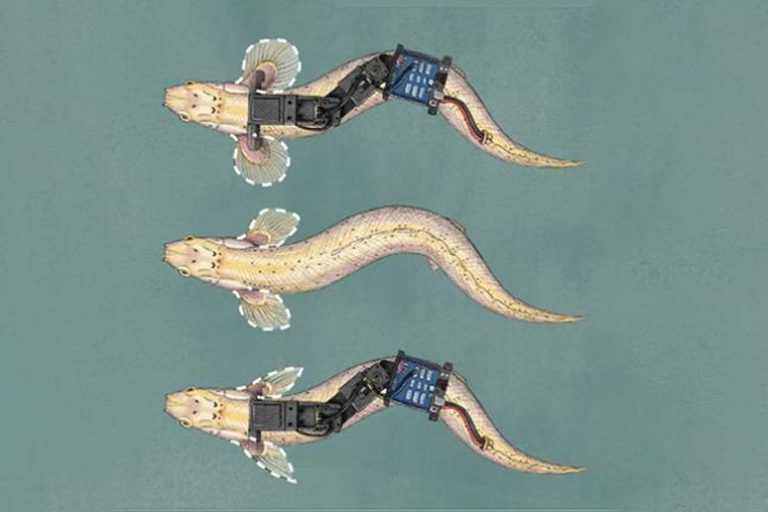
Há mais de 390 milhões de anos, os ancestrais dos animais terrestres modernos deram seus primeiros passos na Terra. Hoje, uma equipe de pesquisa da Universidade de Cambridge está desenvolvendo robôs “inspirados no paleo” que podem reconstituir um dos eventos mais importantes da história do mundo vivo. Esses robôs serão inspirados nas estruturas corporais e estilos de movimento de peixes antigos do período Devoniano Tardio — quando sua evolução começou — bem como nos atuais “peixes ambulantes” como os mudskippers, de acordo com uma revisão de outubro de 2024 publicada na Science Robotics .
Com um estudo mais detalhado, os pesquisadores esperam obter uma melhor compreensão de como os primeiros vertebrados podem ter dado seus primeiros passos em solo sólido. O objetivo final é entender como essa mudança fundamental de nadar para andar abriu caminho para as diversas espécies terrestres que vemos hoje, incluindo nós mesmos.
Desconstruindo a mecânica da evolução em movimento
Embora a pesquisa estabeleça algumas metas ambiciosas, ela é o mais recente de uma série de projetos de robótica inovadores do Laboratório de Robótica Bioinspirada (BIRL) da Universidade de Cambridge. Do desenvolvimento de um robô que constrói suas próprias ferramentas com cola quente à otimização do cultivo de batata com automação alimentada por IA, a BIRL tem expandido os limites do que os robôs podem alcançar. Agora, a equipe liderada pelo Professor Fumiya Iida está aspirando cavar mais fundo do que nunca em uma das maiores maravilhas evolutivas da vida: os primeiros passos dados da água para a terra.
Os paleorrobôs criados pela equipe do laboratório não são máquinas comuns. Construídos usando materiais de ponta e tecnologias robóticas, cada robô é projetado para se assemelhar muito à anatomia e biomecânica das primeiras espécies de peixes. Esses robôs são equipados para simular movimentos e interações ambientais que espécies antigas podem ter experimentado ao se moverem de habitats aquáticos para terrestres.
Ao observar como os robôs respondem a várias superfícies, a equipe pode reunir dados valiosos sobre a mecânica de locomoção. Os pesquisadores estão particularmente interessados em como os primeiros peixes podem ter alterado suas estruturas de nadadeiras para desenvolver um movimento mais adequado para a terra.
“Queremos saber coisas como quanta energia diferentes padrões de caminhada exigiriam, ou quais movimentos foram mais eficientes”, disse o Dr. Michael Ishida, principal autor do projeto na Universidade de Cambridge. Por meio desses robôs, a equipe do BIRL pode observar essa dinâmica diretamente, estudando como mudanças no posicionamento das nadadeiras e na distribuição do peso corporal podem ter influenciado a evolução da caminhada baseada em membros. O foco em como os paleorrobôs se movem por diferentes ambientes também aborda questões sobre os obstáculos ecológicos que as espécies antigas enfrentaram.
A abordagem do BIRL permite que seus pesquisadores avaliem em tempo real as adaptações ambientais que podem ter sido necessárias para que peixes antigos saíssem da água e começassem a vida em terra.
Uma incursão além dos fósseis: aproveitando o poder da robótica avançada
O uso de paleorrobôs marca um afastamento ousado dos métodos tradicionais de estudo da biologia evolutiva. Por décadas, os cientistas confiaram em registros fósseis e, mais recentemente, em simulações de computador para fazer inferências sobre a mecânica da locomoção dos primeiros vertebrados. Os fósseis fornecem informações críticas sobre a anatomia de criaturas antigas, mas são principalmente limitados aos instantâneos estáticos da estrutura esquelética. As simulações de computador adicionam outra camada, permitindo que os pesquisadores simulem movimentos com base em estruturas fósseis.
Entretanto, mesmo essas simulações seriam restritas às informações coletadas dos próprios fósseis. Os paleorrobôs do BIRL poderiam preencher essa lacuna com uma alternativa dinâmica e prática. Enquanto fósseis e simulações oferecem instantâneos, os paleorrobôs seriam capazes de apresentar um documentário completo, permitindo que os pesquisadores “observassem” como essas criaturas poderiam ter andado.
Ter modelos físicos para estudar daria aos pesquisadores dados em tempo real sobre a dinâmica do movimento. Eles poderiam ajustar e testar configurações anatômicas de maneiras que fósseis ou simulações por si só simplesmente não conseguem. Por meio desses robôs físicos, a equipe do BIRL poderia facilmente ajustar variáveis como distribuição de peso corporal, ângulo da nadadeira e resistência do solo, criando um modelo interativo que produz insights tangíveis.